@RudiW: Du setzt -- vermutlich verleitet von
@delta.m's Grafik -- in Deiner Berechnung in
diesem Beitrag voraus, dass unter den beschriebenen Bedingungen der Winkel, unter dem die Kugeln von dem Würfel abprallen, tatsächlich 90° beträgt. Das ist nicht der Fall. Die Bedingungen sind in sich widersprüchlich, und führen, sofern man den Abprallwinkel als variablen Parameter betrachtet, zu einem Abprallwinkel von ca. 76°. Der Würfel kommt dabei nicht zum Stillstand, sondern wird nur abgebremst. Betrachtet man die Geschwindigkeit der Kugeln als variablen Parameter, muss sie für einen 90°-Abprallwinkel das negativ Doppelte der Geschwindigkeit des Würfels betragen. Der Würfel kehrt dann beim Zusammenstoß seine Bewegungsrichtung um. Die Einzelheiten gehen aus dem Hauptteil dieses Beitrags hervor.
@delta.m: Die -- etwas allgemeiner gefasste -- Berechnung Deines Beispiels aus
diesem Beitrag ist ein bemerkenswert schwieriges Problem, für dessen Erläuterung ich, wie angekündigt, etwas weiter ausholen möchte.
In der Physik werden
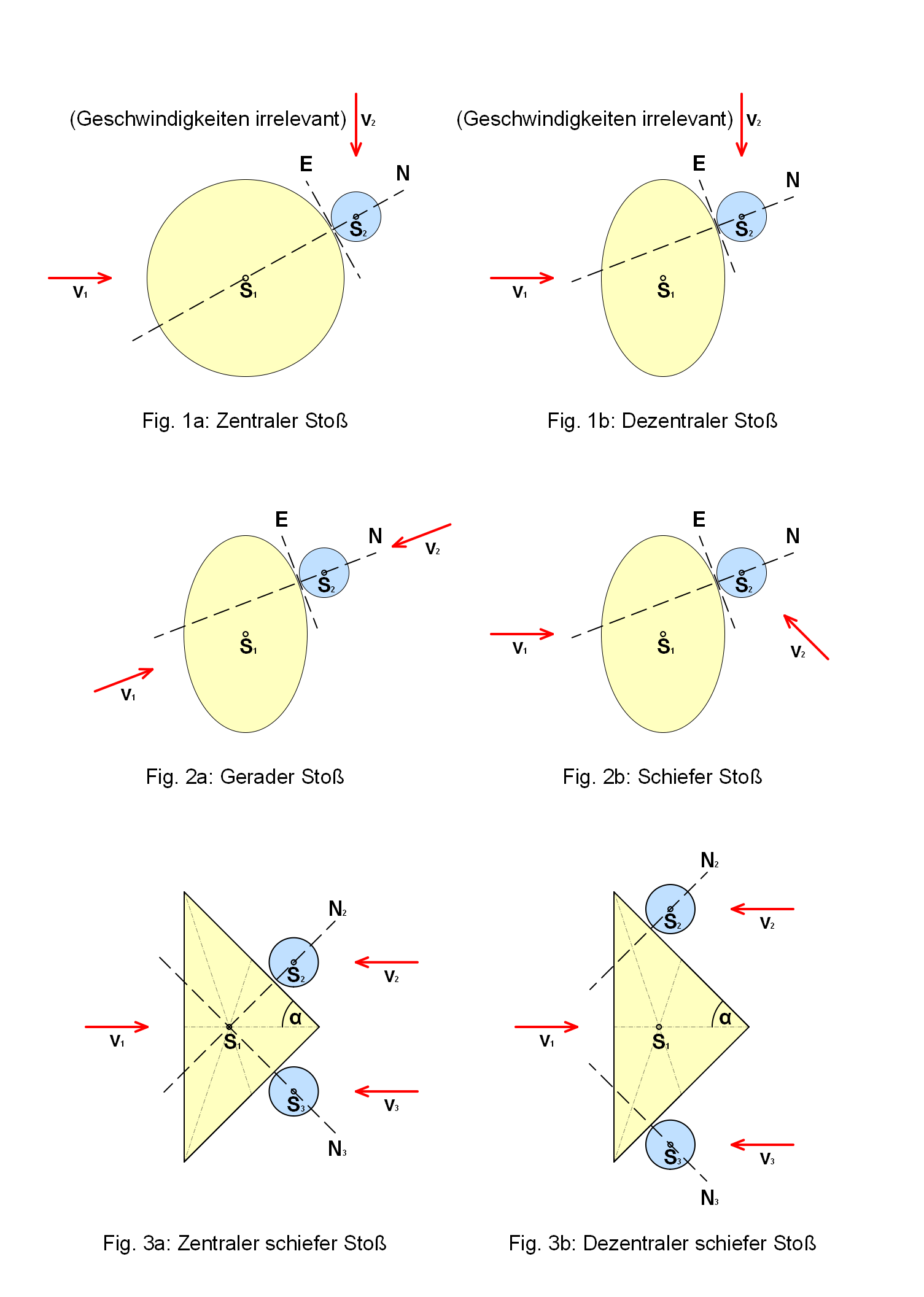
Stoßprozesse im wesentlichen in vier Kategorien eingeteilt, die grösstenteils in beliebigen Kombinationen auftreten können. Die folgende Zeichnung soll zur Veranschaulichung der ersten beiden Kategorien dienen. Die Zeichnung wird hier im Forum verkleinert dargestellt, kann jedoch in Originalgrösse heruntergeladen werden (bei den meisten Webbrowsern über das Rechte-Maustaste-Menü). Die Geschwindigkeitsvektoren in der Zeichnung beziehen sich jeweils auf den Schwerpunkt S
n des jeweiligen Objekts. Formal richtiger wäre es, die Geschwindigkeitsvektoren an den Schwerpunkten beginnen zu lassen, ich habe mich jedoch zugunsten der Übersichtlichkeit für die Darstellung vor den Schwerpunkten entschieden.
Zunächst eine wichtige allgemeine Definition:
Die
Stoßnormale (N) ist diejenige Gerade, die senkrecht zur Berührungsebene durch den Berührungspunkt verläuft. Die
Berührungsebene (E) ist diejenige Ebene, die tangential zu den beiden zusammenstoßenden Objekten durch den Berührungspunkt verläuft.
Nun zu den einzelnen Stoßarten, die, wie erwähnt, grösstenteils in beliebigen Kombinationen auftreten können:
1. Zentraler (oder: zentrischer) Stoß (Fig 1a) / Dezentraler (oder: exzentrischer) Stoß (Fig. 1b):Ein Stoß ist zentral, wenn die Stoßnormale (N) durch die Schwerpunkte S
n der beiden zusammenstoßenden Objekte verläuft. Wichtig: Die Bewegungsrichtungen der Objekte sind für diese Einteilung nicht relevant (die Geschwindigkeitvektoren in Fig. 1a und Fig. 1b sind nur Beispiele). Bei zusammenstoßenden idealen Kreisscheiben oder Kugeln verläuft die Stoßnormale immer durch beide Schwerpunkte, d.h. es handelt sich in diesem Fall immer um einen zentralen Stoß. Liegt mindestens einer der beiden Schwerpunkte nicht auf der Stoßnormalen, handelt es sich um einen dezentralen Stoß. Ein dezentraler Stoß führt i.d.R. (aber nicht immer) zu einer Drehbewegung mindestens eines der zusammenstoßenden Objekte. Ein zentraler Stoß ist i.d.R. einfacher zu berechnen als ein dezentraler Stoß.
2. Gerader Stoß (Fig. 2a) / Schiefer Stoß (Fig 2b):Ein Stoß ist gerade, wenn die Geschwindigkeitsvektoren der beiden zusammenstoßenden Objekte parallel zur Stoßnormalen (N) verlaufen. Verläuft mindestens einer der beiden Geschwindigkeitsvektoren nicht parallel zur Stoßnormalen, handelt es sich um einen schiefen Stoß. Ein gerader Stoß ist i.d.R. einfacher zu berechnen als ein schiefer Stoß. Ist ein Stoß zentral und gerade entspricht das dem besonders einfachen Szenario des eindimensionalen Stoßes (bei dem alle Bewegungsabläufe auf einer Linie liegen).
3. Elastischer Stoß / Unelastischer (oder: plastischer) Stoß:Ein Stoß ist ideal elastisch, wenn kein Anteil der Bewegungsenergie der beiden zusammenstoßenden Objekte beim Stoß in andere Energieformen wie Verformungs- oder Reibungsenergie umgewandelt wird. Ein Stoß ist ideal unelastisch, wenn der maximal mögliche Anteil der Bewegungsenergie der beiden zusammenstoßenden Objekte beim Stoß in andere Energieformen umgewandelt wird. Reale Stöße sind stets Mischformen aus elastischem und unelastischem Stoß. Der Zusammenstoß von Billardkugeln kommt einem ideal elastischen Stoß ziemlich nahe, der Zusammenstoß von Knetekugeln kommt einem ideal unelastischen Stoß ziemlich nahe. In diesem Beitrag geht es nur um ideal elastische Stöße.
4. Glatter Stoß / Rauer Stoß:Ein Stoß ist ideal glatt, wenn die Kräfte während des Stoßes ausschliesslich in Richtung der Stoßnormalen verlaufen. Treten durch Reibung an der Berührungsstelle auch Kräfte in anderen Richtungen auf, handelt es sich um einen rauen Stoß. Führen diese Kräfte dazu, dass sich die Tangentialgeschwindigkeiten der beiden Objekte am Berührungspunkt vollständig angleichen, handelt es sich um einen ideal rauen Stoß. Ein rauer Stoß führt i.d.R. (aber nicht immer) zu einer Drehbewegung mindestens eines der zusammenstoßenden Objekte. Reale Stöße sind mit Ausnahme von zentralen geraden Stößen stets zu einem gewissen (allerdings u.U. vernachlässigbaren) Grad raue Stöße. Der Zusammenstoß von Billardkugeln kommt einem ideal glatten Stoß ziemlich nahe, der Zusammenstoß von Objekten mit einer sandpapierartigen Oberfläche entspricht einem hochgradig rauen Stoß. In diesem Beitrag geht es nur um ideal glatte Stöße.
Diese vier Kategorien decken immer noch nicht alle real möglichen Stöße ab (es gibt u.a. noch Sonderfälle wie superelastische oder reaktive Stöße), und in bestimmten Fällen muss auch der Stoßvorgang selbst detaillierter betrachtet werden als in diesen idealisierten Standardfällen. In vielen Fällen reichen diese vier Kategorien (oft auch bereits die ersten drei) jedoch für eine sinnvolle Berechnung realer Stöße aus.
Nun zum konkreten Beispiel aus
diesem Beitrag. Für die Diskussion hier leicht abgeändert ist das entsprechenden Modell in Fig. 3a und Fig. 3b abgebildet. Bei Fig. 3a handelt es sich um einen doppelten zentralen schiefen elastischen glatten Stoß, bei Fig. 3b um einen doppelten dezentralen schiefen elastischen glatten Stoß.
;) Der Unterschied besteht darin, dass beim zentralen Stoß (Fig. 3a) die Kugeln genau an den Punkten auf dem Dreieck auftreffen müssen, bei denen die Stoßnormalen (N) durch den Schwerpunkt des Dreiecks verlaufen. Beim dezentralen Stoß (Fig. 3b) besteht diese Einschränkung nicht, d.h. die Kugeln dürfen an jedem Punkt der jeweiligen Dreiecksseite auftreffen. Der Fall des zentralen Stoßes (Fig. 3a) ist dafür jedoch einfacher zu berechnen, weil es möglich ist, den zentralen schiefen Stoß auf den zentralen geraden Stoß, d.h. den eindimensionalen Fall zurückzuführen.
An dieser Stelle zunächst die allgemeine Herleitung für den zentralen geraden elastischen glatten Stoß. Bei zentralen geraden Stößen liegen alle Bewegungsabläufe, wie bereits erwähnt, auf einer Linie, d.h. man kann sie als eindimensional betrachten. Bei
Wikipedia gibt es anschauliche animierte Grafiken für dieses Szenario. Bei dieser Stoßart bewegen sich zwei Objekte mit den Massen m
1 und m
2 zentral und gerade aufeinander zu. Die Geschwindigkeit des Objekts m
1 betrage vor dem Stoß v
1 und nach dem Stoß v
1', diejenige des Objekts m
2 betrage vor dem Stoß v
2 und nach dem Stoß v
2'. Die Massen und die Geschwindigkeiten vor dem Stoß sind gegeben, gesucht werden die Geschwindigkeiten nach dem Stoß.
Aus dem Energieerhaltungssatz folgt, dass die Gesamtsumme der kinetischen Energien
(E=\frac{1}{2}mv^2) vor und nach dem Stoß gleich sein muss:
{\tag 1}\frac{1}{2}m_1v_1^2+\frac{1}{2}m_2v_2^2=\frac{1}{2}m_1v_1'^2+\frac{1}{2}m_2v_2'^2
Aus dem Impulserhaltungssatz folgt, dass die Gesamtsumme der Impulse
(\vec{p}=m\vec{v}) vor und nach dem Stoß gleich sein muss (da hier der eindimensionale Fall betrachtet wird, lasse ich die Vektor-Pfeile vereinfachungshalber weg):
{\tag 2}m_1v_1+m_2v_2=m_1v_1'+m_2v_2'
Zwei Unbekannte (v
1' und v
2') und zwei Gleichungen ... sieht soweit schon mal gut aus.
;) Ich zeige im folgenden den Lösungsweg für dieses Gleichungsystem, den ich für am besten nachvollziehbar halte. Es gibt mathematisch elegantere Lösungswege, die allerdings m.E. schwerer verständlich sind.
Um Quadrate und Wurzeln beim Gleichungslösen "loszuwerden", ist oft die Formel
a^2-b^2=(a+b)(a-b) nützlich. Durch Multiplikation mit 2 und Umordnen lässt sich Gleichung (1) (Energieerhaltung) in geeignete Form für die Anwendung dieser Formel bringen:
{\tag 3}m_1(v_1^2-v_1'^2)=m_2(v_2'^2-v_2^2)
Die Anwendung der Formel
a^2-b^2=(a+b)(a-b) auf Gleichung (3) ergibt:
{\tag 4}m_1(v_1+v_1')(v_1-v_1')=m_2(v_2'+v_2)(v_2'-v_2)
Gleichung (2) (Impulserhaltung) ergibt aufgelöst nach v
2':
{\tag 5}v_2'=\frac{m_1}{m_2}(v_1-v_1')+v_2
Diesen Ausdruck für v
2' kann man nun in Gleichung (4) einsetzen:
{\tag 6}m_1(v_1+v_1')(v_1-v_1')=m_2(\frac{m_1}{m_2}(v_1-v_1')+v_2+v_2)(\frac{m_1}{m_2}(v_1-v_1')+v_2-v_2)
Vereinfachen ergibt:
{\tag 7}m_1(v_1+v_1')(v_1-v_1')=(\frac{m_1}{m_2}(v_1-v_1')+2v_2)(m_1(v_1-v_1'))
Der Ausdruck
m_1(v_1-v_1') steht als Faktor auf beiden Seiten der Gleichung, kann also durch Dividieren eliminiert werden:
{\tag 8}v_1+v_1'=\frac{m_1}{m_2}(v_1-v_1')+2v_2
Umordnen ergibt:
{\tag 9}v_1'(1+\frac{m_1}{m_2})=v_1(\frac{m_1}{m_2}-1)+2v_2
Auflösen nach v
1' ergibt:
{\tag {10a}}v_1'=\frac{v_1(m_1-m_2)+2v_2m_2}{m_1+m_2}
Die entsprechende Rechnung für v
2' (beginnend mit der Auflösung von Gleichung (5) nach v
1' statt v
2') ergibt:
{\tag {10b}}v_2'=\frac{v_2(m_2-m_1)+2v_1m_1}{m_1+m_2}
Diese Gleichungen sind zu den entsprechenden Gleichungen bei Wikipedia äquivalent, auch wenn letztere eine etwas andere Form haben.
Nun zurück zum mehrdimensionalen zentralen schiefen Stoß (Fig. 3a), allerdings zunächst noch beschränkt auf zwei zusammenstoßende Objekte. Bei dieser Stoßart ist es möglich, die Impulse
\vec{p}_n der zusammenstoßenden Objekte jeweils in eine Komponente in Richtung der Stoßnormalen
\vec{p}_{n\mathrm{N}} und eine Komponente senkrecht dazu (tangential zu den beiden zusammenstoßenden Objekten)
\vec{p}_{n\mathrm{T}} zu zerlegen. Die Komponenten in Richtung der Stoßnormalen können dann relativ einfach wie beim eindimensionalen Stoß behandelt werden. Die Komponenten senkrecht zur Stoßnormalen bleiben vom Stoß unbeeinflusst. Anschliessend kann man die Komponenten wieder zusammensetzen, woraus sich die resultierenden Bewegungen der Objekte ergeben. Da die Impulse der Objekte direkt proportional zu den Geschwindigkeiten sind (
\vec{p}=m\vec{v}), kann man statt der Impulse auch die Geschwindigkeiten betrachten.
Für die Zerlegung der Impulse bzw. Geschwindigkeiten gelten die Rechenregeln des rechtwinkligen Dreiecks. Für die Geschwindigkeitskomponenten vor dem Stoß gilt:
{\tag {11a}}v_\mathrm{1N}=v_\mathrm{1x}\sin(\alpha)+v_\mathrm{1y}\cos(\alpha)
{\tag {11b}}v_\mathrm{1T}=v_\mathrm{1x}\cos(\alpha)-v_\mathrm{1y}\sin(\alpha)
{\tag {11c}}v_\mathrm{2N}=v_\mathrm{2x}\sin(\alpha)+v_\mathrm{2y}\cos(\alpha)
{\tag {11d}}v_\mathrm{2T}=v_\mathrm{2x}cos(\alpha)-v_\mathrm{2y}\sin(\alpha)
Umgekehrt gilt:
{\tag {12a}}v_\mathrm{1x}=v_\mathrm{1N}\sin(\alpha)+v_\mathrm{1T}\cos(\alpha)
{\tag {12b}}v_\mathrm{1y}=v_\mathrm{1N}\cos(\alpha)-v_\mathrm{1T}\sin(\alpha)
{\tag {12c}}v_\mathrm{2x}=v_\mathrm{2N}\sin(\alpha)+v_\mathrm{2T}\cos(\alpha)
{\tag {12d}}v_\mathrm{2y}=v_\mathrm{2N}cos(\alpha)-v_\mathrm{2T}\sin(\alpha)
Die Geschwindigkeitskomponenten nach dem Stoß berechnen sich für die Komponenten in Richtung der Stoßnormalen gemäss den Gleichungen (10a) und (10b). Die Komponenten senkrecht zur Stoßnormalen bleiben unverändert.
{\tag {13a}}v_{1\mathrm{N}}'=\frac{(v_\mathrm{1x}\sin(\alpha)+v_\mathrm{1y}\cos(\alpha))(m_1-m_2)+2(v_\mathrm{2x}\sin(\alpha)+v_\mathrm{2y}\cos(\alpha))m_2}{m_1+m_2}
{\tag {13b}}v_{2\mathrm{N}}'=\frac{(v_\mathrm{2x}\sin(\alpha)+v_\mathrm{2x}\cos(\alpha))(m_2-m_1)+2(v_\mathrm{1x}\sin(\alpha)+v_\mathrm{1y}\cos(\alpha))m_1}{m_1+m_2}
Nun kann man mittels der Gleichungen (12a..d) die Geschwindigkeitskomponenten in Richtung der Stoßnormalen und senkrecht dazu wieder in das x/y-System umrechnen:
{\tag {14a}}v_{\mathrm{1x}}'=v_{\mathrm{1N}}'\sin(\alpha)+v_{\mathrm{1T}}\cos(\alpha)=\frac{(v_\mathrm{1x}\sin(\alpha)+v_\mathrm{1y}\cos(\alpha))(m_1-m_2)+2(v_\mathrm{2x}\sin(\alpha)+v_\mathrm{2y}\cos(\alpha))m_2}{m_1+m_2}\sin(\alpha)+(v_\mathrm{1x}\cos(\alpha)-v_\mathrm{1y}\sin(\alpha))\cos(\alpha)
{\tag {14b}}v_{\mathrm{1y}}'=v_{\mathrm{1N}}'\cos(\alpha)-v_{\mathrm{1T}}\sin(\alpha)=\frac{(v_\mathrm{1x}\sin(\alpha)+v_\mathrm{1y}\cos(\alpha))(m_1-m_2)+2(v_\mathrm{2x}\sin(\alpha)+v_\mathrm{2y}\cos(\alpha))m_2}{m_1+m_2}\cos(\alpha)-(v_\mathrm{1x}\cos(\alpha)-v_\mathrm{1y}\sin(\alpha))\sin(\alpha)
{\tag {14c}}v_{\mathrm{2x}}'=v_{\mathrm{2N}}'\sin(\alpha)+v_{\mathrm{2T}}\cos(\alpha)=\frac{(v_\mathrm{2x}\sin(\alpha)+v_\mathrm{2x}\cos(\alpha))(m_2-m_1)+2(v_\mathrm{1x}\sin(\alpha)+v_\mathrm{1y}\cos(\alpha))m_1}{m_1+m_2}\sin(\alpha)+(v_\mathrm{2x}cos(\alpha)-v_\mathrm{2y}\sin(\alpha))\cos(\alpha)
{\tag {14d}}v_{\mathrm{2y}}'=v_{\mathrm{2N}}'\cos(\alpha)-v_{\mathrm{2T}}\sin(\alpha)=\frac{(v_\mathrm{2x}\sin(\alpha)+v_\mathrm{2x}\cos(\alpha))(m_2-m_1)+2(v_\mathrm{1x}\sin(\alpha)+v_\mathrm{1y}\cos(\alpha))m_1}{m_1+m_2}\cos(\alpha)+(v_\mathrm{2x}cos(\alpha)-v_\mathrm{2y}\sin(\alpha))\sin(\alpha)
Diese Ausdrücke lassen sich deutlich vereinfachen:
{\tag {15a}}v_{\mathrm{1x}}'=\frac{2m_2(v_\mathrm{2x}-v_\mathrm{1x})\sin^2(\alpha)+2m_2(v_\mathrm{2y}-v_\mathrm{1y})\sin(\alpha)\cos(\alpha)}{m_1+m_2}+v_{\mathrm{1x}}
{\tag {15b}}v_{\mathrm{1y}}'=\frac{2m_2(v_\mathrm{2y}-v_\mathrm{1y})\cos^2(\alpha)+2m_2(v_\mathrm{2x}-v_\mathrm{1x})\sin(\alpha)\cos(\alpha)}{m_1+m_2}+v_{\mathrm{1y}}
{\tag {15c}}v_{\mathrm{2x}}'=\frac{2m_1(v_\mathrm{1x}-v_\mathrm{2x})\sin^2(\alpha)+2m_1(v_\mathrm{1y}-v_\mathrm{2y})\sin(\alpha)\cos(\alpha)}{m_1+m_2}+v_{\mathrm{2x}}
{\tag {15d}}v_{\mathrm{2y}}'=\frac{2m_1(v_\mathrm{1y}-v_\mathrm{2y})\cos^2(\alpha)+2m_1(v_\mathrm{1x}-v_\mathrm{2x})\sin(\alpha)\cos(\alpha)}{m_1+m_2}+v_{\mathrm{2y}}
Diese Formeln liefern für den Zusammenstoß
einer Kugel mit dem Dreieck -- unter der erwähnten Bedingung, dass es sich um einen zentralen Stoß handelt, d.h. dass die Stoßnormale wie in Fig. 3a duch den Schwerpunkt des Dreiecks verläuft -- für beliebige Winkel, Massen, und Geschwindigkeiten die resultierenden Geschwindigkeiten nach dem Zusammenstoß. Bei einem
dezentralen Zusammenstoß mit einer Kugel (wie in Fig. 3b, nur mit einer Kugel) würde das Dreieck in Drehung versetzt. Das kann man ebenfalls berechnen, ist aber ein anderes Thema.
Wie berechnet man nun den gleichzeitigen Zusammenstoß von mehr als zwei Objekten? Das ist ein ziemlich schwieriges Problem. Ich möchte zunächst erläutern, wie es
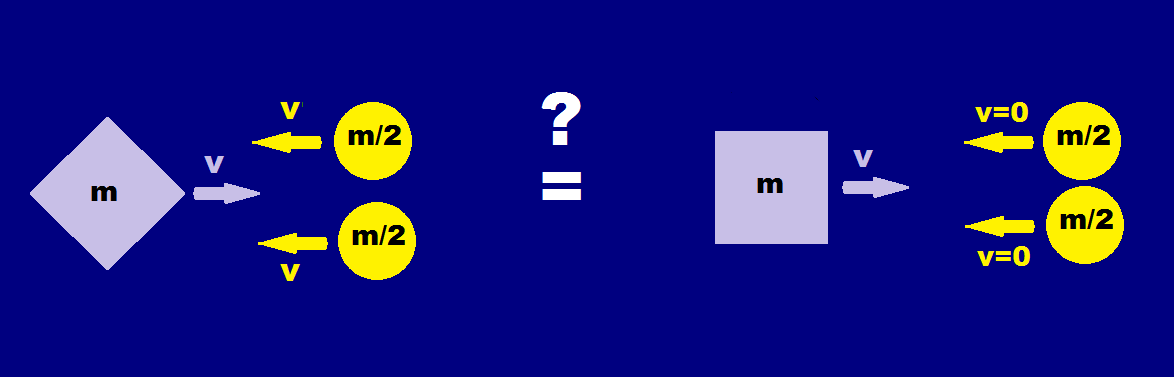
nicht funktioniert. Man kann die beiden Zusammenstöße -- von einem wichtigen Sonderfall abgesehen -- nicht nacheinander berechnen. Dazu ein eindimensionales Beispiel: Zwei ideal elastische Objekte mit den gleichen Massen m
2=m und m
3=m bewegen sich mit den entgegengesetzt gleichen Geschwindigkeiten v
2=v und v
3=-v von beiden Seiten auf ein in der Mitte ruhendes (v
1=0) ebenfalls ideal elastisches Objekt mit der doppelten Masse m
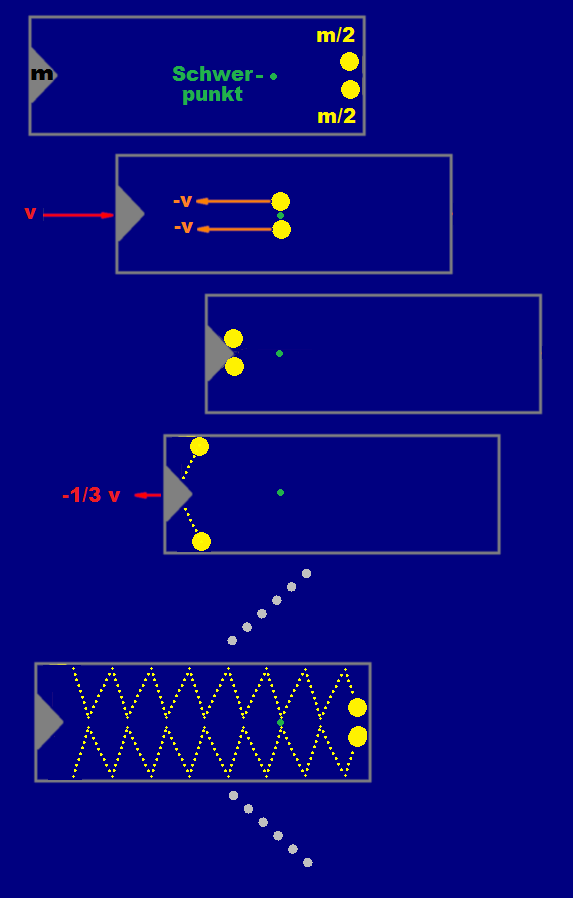
1 = 2m zu. Das richtige Ergebnis bei einem gleichzeitigen Zusammenstoß ist leicht zu raten: Die äusseren Objekte würden sich genau so verhalten, als ob sie direkt zusammenstoßen würden, d.h. sie würden ihre Geschwindigkeiten umkehren, und das Objekt in der Mitte würde in Ruhe liegenbleiben.
Berechnet man zunächst den Zusammenstoß zwischen m
1 und m
2 ergibt sich mittels der Gleichungen (10a) und (10b) (ein Teil der Terme fällt wegen v
1=0 weg):
{\tag {16a}}v_1'=\frac{2vm}{2m+m}=\frac{2}{3}v
{\tag {16b}}v_2'=\frac{v(m-2m)}{{2m+m}}=-\frac{1}{3}v
Das mittlere Objekt m
1 bewegt sich also mit 2/3 der Geschwindigkeit, die vorher Objekt m
2 hatte, auf Objekt m
3 zu, und Objekt m
2 kehrt seine Bewegungsrichtung um, und bewegt sich mit 1/3 seiner ursprünglichen Geschwindigkeit in die Richtung, aus der es gekommen ist.
Nun der Zusammenstoß zwischen m
1 und m
3:
{\tag {17a}}v_1''=\frac{(\frac{2}{3}v)(2m-m)+2(-v)m}{2m+m}=-\frac{4}{9}v
{\tag {17b}}v_3''=\frac{(-v)(m-2m)+2(\frac{2}{3}v)2m}{2m+m}=\frac{11}{9}v
Das mittlere Objekt m
1 kehrt also seine Bewegungsrichtung um, und sich bewegt mit ca. -0,44 v auf Objekt m
2 zu. Da der Betrag der Geschwindigkeit höher als derjenige von Objekt m
2 (-1/3 v) ist, kommt es zu einem weiteren Zusammenstoß. Objekt m
3 kehrt seine Bewegungsrichtung ebenfalls um, und bewegt sich mit einer etwas höheren (ca. 1,22 v) als seiner ursprünglichen Geschwindigkeit in die Richtung, aus der es gekommen ist.
Nun der erneute Zusammenstoß zwischen m
1 und m
2:
{\tag {18a}}v_1'''=\frac{(-\frac{4}{9}v)(2m-m)+2(-\frac{1}{3}v)m}{2m+m}=-\frac{10}{27}v
{\tag {18b}}v_2'''=\frac{(-\frac{1}{3}v)(m-2m)+2(-\frac{4}{9}v)2m}{2m+m}=-\frac{13}{27}v
Das mittlere Objekt m
1 wird also etwas abgebremst, und bewegt sich mit ca. -0,37 v in die gleiche Richtung wie Objekt m
2. Objekt m
2 wird etwas beschleunigt, und bewegt sich mit ca. -0,48 v in die Richtung, aus der es ursprünglich gekommen ist. Da sich die beiden äusseren Objekte nun nach aussen bewegen, und das mittlere Objekt langsamer als dasjenige ist, in dessen Richtung es sich bewegt, kommt es zu keinen weiteren Zusammenstößen mehr. Die Korrektkeit der berechneten Geschwindigkeiten lässt sich über den Energie- und den Impulserhaltungssatz leicht nachprüfen.
Das ist offensichtlich (u.a. wegen der starken Asymmetrie) ein
völlig anderes Ergebnis, als dasjenige, das bei einem gleichzeitigen Zusammenstoß der Objekte zu erwarten gewesen wäre. Andererseits ist es aber auch nicht falsch, es entspricht tatsächlich dem Szenario, dass die Zusammenstöße etwas zeitlich versetzt stattfinden. Ich finde diesen Unterschied bemerkenswert, weshalb ich dieses Beispiel relativ ausführlich erläutert habe.
Das Problem, zwei gleichzeitige Zusammenstöße zu berechnen, ist also noch offen. An dieser Stelle kommt ein wichtiger Sonderfall zu Hilfe. Es gibt nämlich eine bestimmte Konstellation, bei der eine Nacheinander-Berechnung der beiden Zusammenstöße ausnahmsweise zum korrekten Ergebnis führt. Das gilt dann, wenn die beiden Stoßnormalen rechtwinklig zueinander verlaufen, weil die Stöße sich in diesem Fall (idealisiert) nicht gegenseitig beeinflussen. Genau dieser Fall ist aber in dem ursprünglichen Beispiel mit dem würfelförmigen Objekt, und auch in meiner Variante mit dem Dreieck bei einem Winkel α = 45° (wie in Fig. 3a und Fig. 3b abgebildet) gegeben.
Da die manuelle Berechnung ziemlich mühsam ist, habe ich für diesen Zweck ein kleines wxMaxima-Programm geschrieben.
Maxima ist eines der ältesten und bekanntesten Computeralgebrasysteme, Open-Source-Software, und für alle wesentlichen Plattformen frei verfügbar. Bei Maxima selbst handelt es sich ein Kommadozeilenprogramm, weshalb im Laufe der Zeit verschiedene Benutzeroberflächen dafür entwickelt wurden, darunter wxMaxima (ebenfalls Open-Source-Software, und ebenfalls für alle wesentlichen Plattformen
frei verfügbar).
https://power2world.net/download/file.php?id=972Bei dem Dateiformat (nach dem Auspacken der zip-Datei) handelt es sich um einfachen Text. Um das Programm laufen zu lassen, muss man es mit wxMaxima öffnen, und dann mit Menü -> Cell -> Evaluate All Cells die Berechnung starten. Im folgenden beschreibe ich den Inhalt und den Ablauf des Programms. Die (wenigen) Kommentare im Programm selbst sind auf Englisch, damit die wichtigsten Hinweise international verständlich sind.
Zunächst werden die Ausgangsparameter für den Dreieckswinkel (dabei sind nur 45° und -45° zulässig), die Massen und die Geschwindigkeiten der Objekte festgelegt. Die Massen beziehen sich dabei auf eine symbolische Masse m und die Geschwindigkeiten auf eine symbolische Geschwindigkeit v. Alternativ könnte man auch konkrete numerische Werte angeben. Die letzte Zeile dieses Abschnitts ist normalerweise auskommentiert. Aktiviert man sie, werden alle Berechnungen symbolisch durchgeführt, d.h. man bekommt als Ergebnis statt eines Werts einen sehr langen Ausdruck, in den man anschliessend die Parameter selbst einsetzen kann.
α:45/360*2*%pi; /* calculation works only with |α|=45°! */;
m1:m;
m2:m*1/2;
m3:m*1/2;
v1x:v;
v1y:0;
v2x:-v;
v2y:0;
v3x:v2x;
v3y:-v2y;
/* kill(m1,m2,m3,v1x,v1y,v2x,v2y,v3x,v3y); */ /* uncomment for symbolic solution */;
Als nächstes ein paar Hilfsfunktionen. E_sum berechnet die Summe der kinetischen Energien aller drei Objekte aus ihren Geschwindigkeitskomponenten. I_sum berechnet die Summe der Impulse aller drei Objekte für eine Raumrichtung (üblicherweise in Richtung der x- oder der y-Achse) aus ihren entsprechenden Geschwindigkeitskomponenten. validate berechnet anhand eines Satzes Geschwindigkeitskomponenten, ob bei diesen Geschwindigkeiten der Energie- und der Impulserhaltungssatz gegenüber den Ausgangsparametern erfüllt sind. Die letzte Zeile ist ein Testaufruf der validate-Funktion (die mit den Ausgangswerten natürlich in jedem Fall erfüllt sein muss). Die Operationen ratsimp und trigsimp haben nichts mit der eigentlichen Berechnung zu tun, sondern weisen Maxima an, bei einer symbolischen Berechnung die Ergebnisausdrücke soweit wie möglich zu vereinfachen.
E_sum(v_1x,v_1y,v_2x,v_2y,v_3x,v_3y):=ratsimp(trigsimp(1/2*m1*(v_1x^2+v_1y^2)+1/2*m2*(v_2x^2+v_2y^2)+1/2*m3*(v_3x^2+v_3y^2)));
I_sum(v_1,v_2,v_3):=ratsimp(trigsimp(m1*v_1+m2*v_2+m3*v_3));
validate(v_1x,v_1y,v_2x,v_2y,v_3x,v_3y):=
is(E_sum(v_1x,v_1y,v_2x,v_2y,v_3x,v_3y)=E_sum(v1x,v1y,v2x,v2y,v3x,v3y)) and
is(I_sum(v_1x,v_2x,v_3x)=I_sum(v1x,v2x,v3x)) and
is(I_sum(v_1y,v_2y,v_3y)=I_sum(v1y,v2y,v3y));
validate(v1x,v1y,v2x,v2y,v3x,v3y);
Nun die Funktionen zur Koordinatentransformation. vN berechnet aus x- und y-Geschwindigkeitskomponenten die entsprechende Geschwindigkeit in Richtung der Stoßnormalen. vT berechnet aus x- und y-Geschwindigkeitskomponenten die entsprechende Geschwindigkeit in Richtung der Stoßtangente (senkrecht zur Stoßnormalen). vx und vy führen die entsprechenden Rechnungen umgekehrt durch.
vN(v_x,v_y):=ratsimp(trigsimp(v_x*sin(α)+v_y*cos(α)));
vT(v_x,v_y):=ratsimp(trigsimp(v_x*cos(α)-v_y*sin(α)));
vx(v_N,v_T):=ratsimp(trigsimp(v_N*sin(α)+v_T*cos(α)));
vy(v_N,v_T):=ratsimp(trigsimp(v_N*cos(α)-v_T*sin(α)));
Nun die zentrale Funktion zur Berechnung des Stoßes selbst (entsprechend Gleichung (10a)):
vZ(v_a,v_b,m_a,m_b):=ratsimp(trigsimp((v_a*(m_a-m_b)+2*v_b*m_b)/(m_a+m_b)));
Die folgenden beiden Funktionen führen die Operationen, die ich für den ersten Zusammenstoß noch einzeln zeigen werde, kombiniert durch: 1. Umrechnung der x/y-Geschwindigkeitsvektoren in das System aus der Stoßnormalen und der Stoßtangente, 2. Berechnung des Stoßes in Richtung der Stoßnormalen, 3. Rück-Umrechnung des Ergebnisses in das x/y-System.
vZx(v_ax,v_ay,v_bx,v_by,m_a,m_b):=ratsimp(trigsimp(vx(vZ(vN(v_ax,v_ay),vN(v_bx,v_by),m_a,m_b),vT(v_ax,v_ay))));
vZy(v_ax,v_ay,v_bx,v_by,m_a,m_b):=ratsimp(trigsimp(vy(vZ(vN(v_ax,v_ay),vN(v_bx,v_by),m_a,m_b),vT(v_ax,v_ay))));
Nun folgen konkrete Berechnungen. Die angegebenen Ergebnisse entsprechen den obigen Ausgangsparametern. Zunächst werden für das Dreieck und die obere Kugel die Geschwindigkeiten in Richtung der Stoßnormalen und der Stoßtangente bestimmt.
v1N:vN(v1x,v1y);
-> 1/√2 v
v1T:vT(v1x,v1y);
-> 1/√2 v
v2N:vN(v2x,v2y);
-> -1/√2 v
v2T:vT(v2x,v2y);
-> -1/√2 v
Nun folgen die Berechnungen der aus dem Zusammenstoß resultierenden Geschwindigkeiten in Richtung der Stoßnormalen (aufgrund der Voraussetzungen ändern sich die Geschwindigkeiten bei einem einzelnen Stoß nur in dieser Richtung).
v1ZN:vZ(v1N,v2N,m1,m2);
-> -1/(3 √2) v
v2ZN:vZ(v2N,v1N,m2,m1);
-> 5/(3 √2) v
Nun folgt die Rück-Umrechnung der Geschwindigkeitsvektoren in das x/y-System. Die Geschwindigkeitskomponenten in Richtung der Stoßtangente sind jeweils unverändert. Die Geschwindigkeitskomponenten der unteren Kugel bleiben bei diesem Zusammenstoß unverändert.
v1Zx:vx(v1ZN,v1T);
-> 1/3 v
v1Zy:vy(v1ZN,v1T);
-> -2/3 v
v2Zx:vx(v2ZN,v2T);
-> 1/3 v
v2Zy:vy(v2ZN,v2T);
-> 4/3 v
v3Zx:v3x;
v3Zy:v3y;
Nun eine Überprüfung, ob das Ergebnis Energie- und Impulserhaltungssatz erfüllt.
validate(v1Zx,v1Zy,v2Zx,v2Zy,v3Zx,v3Zy);
-> true
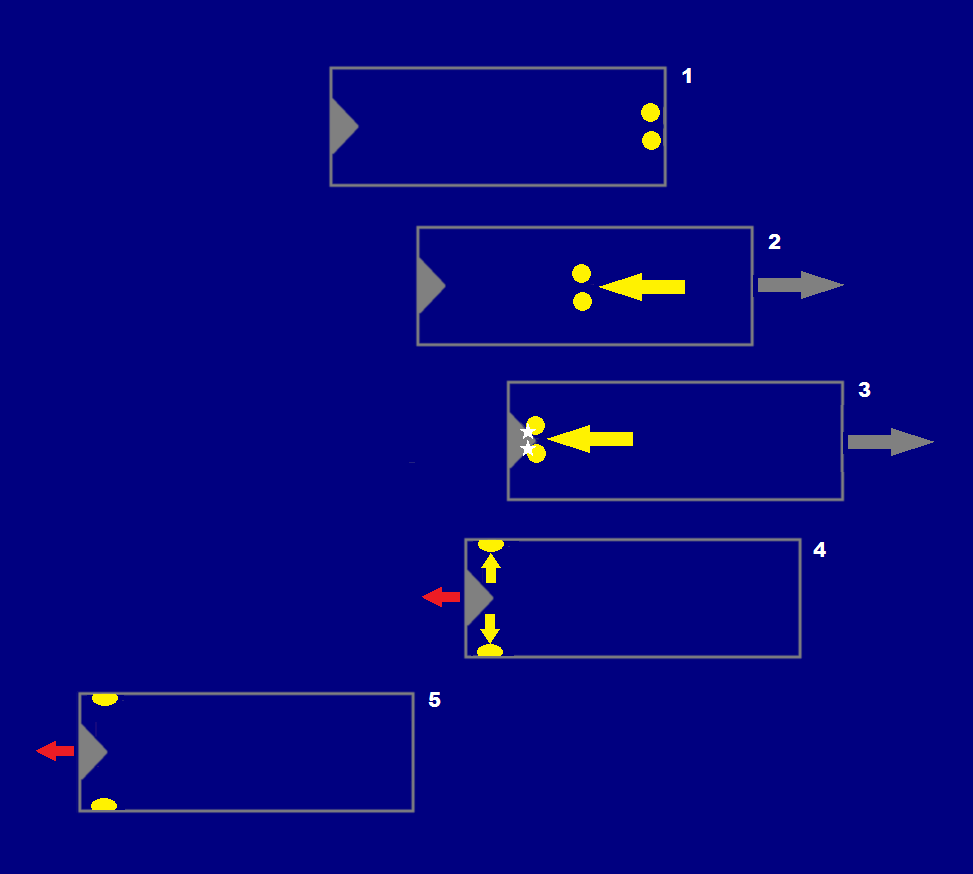
Nun folgen die Berechnungen für den Zusammenstoß zwischen dem Dreieck und der unteren Kugel. Dafür muss vorab der Winkel α für die untere Dreiecksseite auf -45° geändert werden. Die Stoßberechnungen werden nicht mehr wie beim ersten Zusammenstoß in Einzelschritten, sondern mit den Kombi-Funktionen vZx und vZy durchgeführt (was für das Ergebnis keine Rolle spielt). Die Geschwindigkeitskomponenten der oberen Kugel bleiben beim diesem Zusammenstoß unverändert. Abschliessend wird noch das Ergebnis überprüft, und der Winkel α der Ordnung halber wieder auf den Ausgangswert gesetzt.
α:-α /* collision on opposite side */;
v1ZZx:vZx(v1Zx,v1Zy,v3Zx,v3Zy,m1,m3);
-> -1/3 v
v1ZZy:vZy(v1Zx,v1Zy,v3Zx,v3Zy,m1,m3);
-> 0
v2ZZx:v2Zx;
v2ZZy:v2Zy;
v3ZZx:vZx(v3Zx,v3Zy,v1Zx,v1Zy,m3,m1);
-> 1/3 v
v3ZZy:vZy(v3Zx,v3Zy,v1Zx,v1Zy,m3,m1);
-> -4/3 v
validate(v1ZZx,v1ZZy,v2ZZx,v2ZZy,v3ZZx,v3ZZy);
-> true
α:-α /* revert to original value */;
Zur besseren Anschaulichkeit des Ergebnisses wird nun noch mittels der Arkustangensfunktion aus den x- und y-Geschwindigkeitskomponenten der oberen Kugel deren Abprallwinkel relativ zur x-Achse berechnet (gerundet auf zwei Nachkommastellen):
v2ZZφ:float(round((atan2(v2ZZy/v,v2ZZx/v)/(2*%pi)*360)*100)/100);
-> 75.96
Das gezeigte Berechnungsverfahren unterliegt, wie erwähnt, den Einschränkungen, dass jeweils nur genau ein Punkt auf den Dreiecksseiten als Kollisionspunkt zulässig ist (dort, wo die Stoßnormale durch den Schwerpunkt des Dreiecks verläuft), und dass der Winkel zwischen den beiden Dreiecksseiten mit den Stoßnormalen 90° betragen muss. Die Massen und Geschwindigkeiten sind allerdings -- auch asymmetrisch -- frei wählbar. Ich hätte gerne noch eine etwas allgemeinere Lösung ausgearbeitet, aber das ist zeitlich vorerst nicht machbar.
Was bedeutet dieses Ergebnis nun für das Gedankenexperiment des "langen Zylinders", aus dem sich die Fragestellung ursprünglich ergab? Stellt man sich das Dreieck aus Fig. 3a an einer Stirnfläche des Zylinders angebracht vor, würde sich beim Zusammenstoß horizontal sowohl die Bewegungsrichtung des Zylinders als auch der Kugeln umkehren. Die Situation ähnelt also dem
hier beschriebenen Szenario, bei dem die Kugeln auf eine senkrechte ideal elastische Stirnfläche auftreffen. Genau wie in diesem Szenario würde der Zylinder, sofern auch die andere Stirnfläche und -- das ist neu -- auch die oberen und unteren Zylinderwände ideal elastisch sind, beginnen horizontal zu oszillieren. Die Oszillationsgeschwindigkeit wäre allerdings geringer als bei dem Szenario mit senkrechten Stirnflächen, weil ein Teil der Bewegungsenergie nun in der vertikalen Bewegung der Kugeln steckt. Der Zylinder selbst würde sich in einem ideal symmetrischen Szenario nicht vertikal bewegen.
Es wäre allerdings ohne weiteres auch ein asymmetrisches Szenario denkbar, z.B. wenn eine Kugel auf eine Dreieckshälfte, und die andere auf eine senkrechte Fläche auftrifft. In diesem Fall würde der Zylinder beginnen, auch vertikal zu "wackeln". Entscheident ist: Bei all diesen Bewegungen bleibt der der Schwerpunkt des Zylinders immer an exakt der gleichen Stelle. Man kann den Zylinder in Oszillation und auch in Drehung versetzen, aber der Schwerpunkt bleibt immer erhalten. Ein Vortrieb lässt sich ohne Interaktion mit der Aussenwelt in keinem Fall erreichen.

skagerak schrieb:Ist das in diesem Stadium nicht auch eher was für extreme Langzeitreisen im Vakuum?