
Was geschah mit Flug MH370?
Zu diesem Thema gibt es eine von Diskussionsteilnehmern erstellte Zusammenfassung im Themen-Wiki.
Themen-Wiki: Was geschah mit Flug MH370?Seite 756 von 2.955vorherige 1 ... 656706746754755756757758766806856 ... 2.955 nächste
Direkt zur Seite:
Was geschah mit Flug MH370?
14.01.2015 um 16:01@lullaby69
QRS11 Single-Axis Analog Gyroscope
The QRS11 is a compact, lightweight design, that features Quartz MEMS technology providing a solid-state gyro offering virtually unlimited life. The QRS11’s combination of high performance and long life makes it well suited for OEM’s and system integrators designing cost effective, high performance systems.
The QRS11 requires only DC voltage inputs to provide reliable, extremely accurate angular rate measurements with the benefit of no moving parts. With a hermetically sealed sensing element, the QRS11 has provided reliable performance in aircraft, missile and space systems across many demanding application environments.
Hersteller:
http://www.systron.com/gyroscopes/qrs11-single-axis-analog-gyroscope
QRS11 Single-Axis Analog Gyroscope
The QRS11 is a compact, lightweight design, that features Quartz MEMS technology providing a solid-state gyro offering virtually unlimited life. The QRS11’s combination of high performance and long life makes it well suited for OEM’s and system integrators designing cost effective, high performance systems.
The QRS11 requires only DC voltage inputs to provide reliable, extremely accurate angular rate measurements with the benefit of no moving parts. With a hermetically sealed sensing element, the QRS11 has provided reliable performance in aircraft, missile and space systems across many demanding application environments.
Hersteller:
Ein Gyrosensor ist ein Beschleunigungs- oder Lagesensor, der auf kleinste Beschleunigungen, Drehbewegungen oder Lageänderungen reagiert. Das Prinzip des Gyrosensors basiert auf der Massenträgheit und wird u.a. in Fliehkraftreglern eingesetzt. Die von einem Gyrosensor erfassten Drehbewegungen werden in einer Spannungsänderung bezogen auf die Drehgeschwindigkeit angegeben: Millivolt pro Grad Drehbewegung pro Sekunde (V/Grad/s).http://www.itwissen.info/definition/lexikon/Gyrosensor-gyro-sensor.html (Archiv-Version vom 26.02.2015)
Wie traditionelle Sensoren wandeln MEMS-Sensoren verschiedenste physikalische Größen in elektrische Spannungen. Das kann Licht sein, ein Drehmoment, die Temperatur, Geschwindigkeit, Beschleunigung, der Druck, der magnetische Fluss oder eine andere physikalische Größe. Die Umwandlung basiert auf statischen, magnetischen, optischen, piezoelektrischen oder elektrothermischen Verfahren.http://www.itwissen.info/definition/lexikon/MEMS-Sensor-MEMS-sensor.html (Archiv-Version vom 03.03.2015)
lullaby69
Profil anzeigen
Private Nachricht
Link kopieren
Lesezeichen setzen
anwesend
dabei seit 2014
dabei seit 2014
Profil anzeigen
Private Nachricht
Link kopieren
Lesezeichen setzen
Was geschah mit Flug MH370?
14.01.2015 um 17:18@ISF
Ja, soweit war ich auch schon.
Nur solche Seiten, wie http://www.systron.com/applications/industrial/inertial-sensors-rov-remotely-operated-vehicle (Archiv-Version vom 31.01.2015)
verwirren mich noch.
Ja, soweit war ich auch schon.
Nur solche Seiten, wie http://www.systron.com/applications/industrial/inertial-sensors-rov-remotely-operated-vehicle (Archiv-Version vom 31.01.2015)
verwirren mich noch.
Was geschah mit Flug MH370?
14.01.2015 um 19:11@lullaby69
Da geht es vermutlich nur um die Versorgung der (
Es dient aufjeden Fall nicht der Fernsteuerung, sondern nur für gewisse Bauteile, bzw. Systeme.
Da geht es vermutlich nur um die Versorgung der (
provide exceptional bias stability) kann das nicht ganz übersetzten, sowas wie: einzigartige Ausrichtungsstabilität oder so ähnlich.
Es dient aufjeden Fall nicht der Fernsteuerung, sondern nur für gewisse Bauteile, bzw. Systeme.
lullaby69
Profil anzeigen
Private Nachricht
Link kopieren
Lesezeichen setzen
anwesend
dabei seit 2014
dabei seit 2014
Profil anzeigen
Private Nachricht
Link kopieren
Lesezeichen setzen
Was geschah mit Flug MH370?
14.01.2015 um 19:34@ISF
Ja, ein wichtiger Chip bei remotely operated vehicles.
So weit ich gelesen hatte, kann man damit in 'Echtzeit' ROV's steuern.
Ja, ein wichtiger Chip bei remotely operated vehicles.
So weit ich gelesen hatte, kann man damit in 'Echtzeit' ROV's steuern.
Was geschah mit Flug MH370?
14.01.2015 um 19:48@lullaby69
Hier stehen nochmal die Vorrausetungen die dieser Chip erbingen muss:
Wo hast du was davon gelesen?lullaby69 schrieb:So weit ich gelesen hatte, kann man damit in 'Echtzeit' ROV's steuern.
Hier stehen nochmal die Vorrausetungen die dieser Chip erbingen muss:
Critical to Customer Requirements:
Exceptional Bias Stability
Low Angle Random Walk Values
Superior Vibration Performance
Hermetically Sealed
Compact Design
lullaby69
Profil anzeigen
Private Nachricht
Link kopieren
Lesezeichen setzen
anwesend
dabei seit 2014
dabei seit 2014
Profil anzeigen
Private Nachricht
Link kopieren
Lesezeichen setzen
Was geschah mit Flug MH370?
14.01.2015 um 20:27Those illegal modifications were reported to FAA, FBI, Boeing and ALPA by Captain Field McConnell, Northwest on 11 December, 2006. Only Boeing has responded in a responsible manner, that being their admission on 3 March, 2007 that the BOEING UNINTERRUPTIBLE AUTOPILOT (QRS-11) existed and was deployed to make a human hijacking impossible.https://www.facebook.com/notes/jeff-prager/breaking-news-on-911-qrs11-exposed-civil-suit-moves-forward/10150160636494838
Der Chip alleine wird ROV's nicht steuern. Fällt bei den USA aber wohl unter ein Waffengesetz und ist Teil der BUAP.
Was geschah mit Flug MH370?
14.01.2015 um 20:29@lullaby69
Ich will keine unseriösen Posts von FB.
Du hast die Seite der Hersteller, des QRS-11 also nutze diese Infos.
Ich will keine unseriösen Posts von FB.
Du hast die Seite der Hersteller, des QRS-11 also nutze diese Infos.

Was geschah mit Flug MH370?
14.01.2015 um 20:29Zu dem Chip habe ich auch so einiges im Netz gefunden. Der Chip QRS-11 wird offiziell in Flugzeugen verwendet, um Signale für die integrierten Systeme und Flugsteuerung zu empfangen und versenden (Antenne). Auch der Autopilot kann über Satellit Daten zur vom Boden aus gesteuerten Kontrolle erhalten. Zu diesem Zwecke wird der Chip auch in Raketen und Drohnen verwendet. Der Chip wurde ursprünglich entwickelt zum Zwecke der Fremdsteuerung von Drohnen und Militärflugzeugen. Mindestens in den Jahren 2000-2003 wurden 94 Boeing-Passagierflugzeuge damit bestückt und ausgeliefert, 19 davon nach China. QRS-11 gilt/galt als Verteidigungswaffe und unterliegt/unterlag der amerikanischen Waffenausfuhrkontrolle. Boeing hat den Export aber nicht gemeldet und wurde daraufhin zu der höchsten je angesetzten Strafzahlung von 15 Million Dollar wegen nicht autorisiertem Export von Verteidigungswaffen verurteilt. QRS-11 hatte den Status des significant military equipment (SME), der der Kontrolle der ITAR unterliegt. Unter dem Druck der Industrie wurde ein Jahr später der Status des QRS-11 offiziell umgewandelt in normales Exportgut.
http://microsat.sm.bmstu.ru/e-library/Algorithms/Hardware/Sensors/QRS11DS.pdf
https://www.pmddtc.state.gov/compliance/consent_agreements/pdf/Boeing_DraftChargingLetter_06.pdf (Archiv-Version vom 07.03.2016)
http://www.flightglobal.com/news/articles/boeing-faces-arms-control-penalty-200264/
http://seattletimes.com/html/businesstechnology/2002918295_boeing08.html
https://www.pmddtc.state.gov/compliance/consent_agreements/pdf/Boeing_DraftChargingLetter_06.pdf (Archiv-Version vom 07.03.2016)
http://www.flightglobal.com/news/articles/boeing-faces-arms-control-penalty-200264/
http://seattletimes.com/html/businesstechnology/2002918295_boeing08.html
Was geschah mit Flug MH370?
14.01.2015 um 20:48Der QRS-11 Chip ist kein Chip um irgendwas fernzusteuern.
Habe die Links hier doch gepostet:
http://www.itwissen.info/definition/lexikon/MEMS-Sensor-MEMS-sensor.html (Archiv-Version vom 03.03.2015)
http://www.systron.com/gyroscopes/qrs11-single-axis-analog-gyroscope (Archiv-Version vom 29.12.2014)
http://www.itwissen.info/definition/lexikon/Gyrosensor-gyro-sensor.html (Archiv-Version vom 26.02.2015)
Habe die Links hier doch gepostet:
http://www.itwissen.info/definition/lexikon/MEMS-Sensor-MEMS-sensor.html (Archiv-Version vom 03.03.2015)
http://www.systron.com/gyroscopes/qrs11-single-axis-analog-gyroscope (Archiv-Version vom 29.12.2014)
http://www.itwissen.info/definition/lexikon/Gyrosensor-gyro-sensor.html (Archiv-Version vom 26.02.2015)
Drehratensensoren messen die Winkelgeschwindigkeit entlang einer Drehachse. Durch Integration lässt sich daraus ableiten, um welchen Winkel sich ein Körper innerhalb einer Zeit gedreht hat. Die Drehraten um die drei Raumachsen bezeichnet man meist als
Hochgenaue Drehratensensoren für die Navigation von Flugzeugen oder Raketen basieren heute auf Faserkreiseln (Sagnac-Effekt). Bei den preiswerteren mikromechanischen Drehratensensoren unterscheidet man zwischen integrierten Sensoren, bei dem die elektronische Auswerteschaltung und der MEMS-Sensorkern in einem Chip integriert sind, sowie diskreten Sensoren. Sie bestehen aus einem separaten Mikromechanik-Chip (MEMS-Chip) und einem anwenderspezifischen Elektronikchip (ASIC).Wikipedia: Drehratensensor
Der Drehratensensor gehört zur Gruppe der Inertialsensoren.
Inertialsensoren dienen der Messung von Beschleunigungen und Drehraten. Durch Kombination mehrerer Inertialsensoren in einer inertialen Messeinheit (englisch inertial measurement unit, IMU) können die Beschleunigungen der sechs Freiheiten gemessen werden. Eine IMU ist Hauptbestandteil eines Inertialen Navigationssystems. Eingesetzt werden IMUs u. a. in der Flugnavigation, der Robotik sowie der Bildstabilisierung zur Bewegungsdetektion.Wikipedia: Inertialsensor
Was geschah mit Flug MH370?
14.01.2015 um 21:59Alternative zum Chip und der Fernsteuerung: Attentäter, der totkrank ist und nichts mehr zu verliieren hat. Hatten wir, glaube ich, noch nicht.
Was geschah mit Flug MH370?
14.01.2015 um 22:53Attentäter wollen eigentlich Aufmerksamkeit. Dass die da was klammheimlich versenken, halte ich für eher unwahrscheinlich.
Vielleicht haben die sich stumpf verflogen und bis sie es festgestellt hatten, gab´s kein zurück mehr. Mit Flugzeugen kannte sich die Person(en) offenbar gut aus, aber vielleicht war der Navigator n bisschen unfähig.
Edit: Oder Shah ist nicht der Täter, sondern der große Held, der den Terroristen n Strich durch die Rechnung macht, indem er die Systeme ausschaltet und so Einfluss auf die Navigation nimmt.
Ich hab aber keinen Dunst von Flugzeugen und weiß daher nicht, ob die abgeschalteten Geräte irgendwie Einfluss auf die Navigation haben.
Kennst sich jemand mit dem Navigieren von Flugzeugen aus?
melden
DearMRHazzard

Profil anzeigen
Private Nachricht
Link kopieren
Lesezeichen setzen
dabei seit 2011Unterstützer
Profil anzeigen
Private Nachricht
Link kopieren
Lesezeichen setzen
Was geschah mit Flug MH370?
15.01.2015 um 02:00@robertwilliams
Auf Basis der verfügbaren Informationen reduziere ich 10 Monate nach dem Verschwinden von MH370 den ganzen Fall nur noch auf seinen einfachsten Nenner.
Demzufolge befanden sich nur 2 Menschen an Bord die einen Airliner fliegen konnten und die Wahrscheinlichkeit ist am Höchsten das einer dieser beiden Personen demnach verantwortlich war für den Absturz im südlichen indischen Ozean westlich vor Australien.
Die beiden Piloten besaßen zugleich die Fähigkeit, die Möglichkeit und die Gelegenheit um MH370 von seiner geplanten Route nach Peking abzubringen und dann zielgerichtet den Airliner über reguläre Wegpunkte zu navigieren bis in die Andamanensee, 1000 Kilometer abweichend von der regulären Flugroute.
Nichts deutet darauf hin das der Irrflug über Malaysia aus der Not heraus entstanden ist sondern eine geplante Aktion gewesen ist. Das belegen eindeutig die Geschwindigkeitsinformationen wie auch die Informationen zur alternativen Routenplanung.
Da das Motiv aber völlig im Dunkeln liegt und nur spekulativ bearbeitet werden kann und 2 Hauptverdächtige in Frage kommen die jedoch unmöglich als Team zusammen gearbeitet haben können ist es vollkommen unmöglich den Täter zwischen diesen beiden Hauptverdächtigen zu identifizieren.
Zu allen anderen Theorien habe ich keinen Bezug mehr denn sie ergeben ohne weitere offiziell bestätigte Informationen für mich keinen Sinn weil zu viele unbelegte Behauptungen aufgestellt werden müssen. In diesem Fall reduziere ich nur noch die Anzahl der Hypothesen auf ein absolutes Minimum und demnach komme ich an den beiden Piloten nicht mehr vorbei.
Auf Basis der verfügbaren Informationen reduziere ich 10 Monate nach dem Verschwinden von MH370 den ganzen Fall nur noch auf seinen einfachsten Nenner.
Demzufolge befanden sich nur 2 Menschen an Bord die einen Airliner fliegen konnten und die Wahrscheinlichkeit ist am Höchsten das einer dieser beiden Personen demnach verantwortlich war für den Absturz im südlichen indischen Ozean westlich vor Australien.
Die beiden Piloten besaßen zugleich die Fähigkeit, die Möglichkeit und die Gelegenheit um MH370 von seiner geplanten Route nach Peking abzubringen und dann zielgerichtet den Airliner über reguläre Wegpunkte zu navigieren bis in die Andamanensee, 1000 Kilometer abweichend von der regulären Flugroute.
Nichts deutet darauf hin das der Irrflug über Malaysia aus der Not heraus entstanden ist sondern eine geplante Aktion gewesen ist. Das belegen eindeutig die Geschwindigkeitsinformationen wie auch die Informationen zur alternativen Routenplanung.
Da das Motiv aber völlig im Dunkeln liegt und nur spekulativ bearbeitet werden kann und 2 Hauptverdächtige in Frage kommen die jedoch unmöglich als Team zusammen gearbeitet haben können ist es vollkommen unmöglich den Täter zwischen diesen beiden Hauptverdächtigen zu identifizieren.
Zu allen anderen Theorien habe ich keinen Bezug mehr denn sie ergeben ohne weitere offiziell bestätigte Informationen für mich keinen Sinn weil zu viele unbelegte Behauptungen aufgestellt werden müssen. In diesem Fall reduziere ich nur noch die Anzahl der Hypothesen auf ein absolutes Minimum und demnach komme ich an den beiden Piloten nicht mehr vorbei.
Was geschah mit Flug MH370?
15.01.2015 um 02:22@DearMRHazzard
Falls es noch von Interesse ist; bezüglich der earth.nullschool Animation — um die aktuellen Meeresströmungen anzuzeigen auf [earth] klicken: Ocean & Currents wählen.
http://earth.nullschool.net/#current/ocean/surface/currents/orthographic=-255.43,-42.84,776
Falls es noch von Interesse ist; bezüglich der earth.nullschool Animation — um die aktuellen Meeresströmungen anzuzeigen auf [earth] klicken: Ocean & Currents wählen.
http://earth.nullschool.net/#current/ocean/surface/currents/orthographic=-255.43,-42.84,776
DearMRHazzard
Profil anzeigen
Private Nachricht
Link kopieren
Lesezeichen setzen
dabei seit 2011Unterstützer
Profil anzeigen
Private Nachricht
Link kopieren
Lesezeichen setzen
Was geschah mit Flug MH370?
15.01.2015 um 02:26@sarkanas
Mode : Ocean
Animate : Ocean
Overlay : Ocean
Ist das so korrekt ? Und dann sieht man zweifellos die Meeresströmungen und kann theoretisch die Drift möglicher Wrackteile zurück verfolgen ?
Mode : Ocean
Animate : Ocean
Overlay : Ocean
Ist das so korrekt ? Und dann sieht man zweifellos die Meeresströmungen und kann theoretisch die Drift möglicher Wrackteile zurück verfolgen ?
Was geschah mit Flug MH370?
15.01.2015 um 02:35@DearMRHazzard
Mode: Ocean
Animate: Currents
Overlay: Currents
Ja sind die aktuellen und akuraten Meeresströmungen (natürlich ändern diese sich etwas übers Jahr); die Daten kommen von: http://www.oscar.noaa.gov/ (Archiv-Version vom 09.02.2015)
Für ein grobes Nachvollziehen oder einen Überblick reicht es sicher.
Für einen speziellen Zeitpunkt kann man die Daten auch abrufen:
http://www.oscar.noaa.gov/datadisplay/oscar_datadownload.php (Archiv-Version vom 21.12.2014)
Mode: Ocean
Animate: Currents
Overlay: Currents
Ja sind die aktuellen und akuraten Meeresströmungen (natürlich ändern diese sich etwas übers Jahr); die Daten kommen von: http://www.oscar.noaa.gov/ (Archiv-Version vom 09.02.2015)
Für ein grobes Nachvollziehen oder einen Überblick reicht es sicher.
Für einen speziellen Zeitpunkt kann man die Daten auch abrufen:
http://www.oscar.noaa.gov/datadisplay/oscar_datadownload.php (Archiv-Version vom 21.12.2014)
DearMRHazzard
Profil anzeigen
Private Nachricht
Link kopieren
Lesezeichen setzen
dabei seit 2011Unterstützer
Profil anzeigen
Private Nachricht
Link kopieren
Lesezeichen setzen
Was geschah mit Flug MH370?
15.01.2015 um 02:38@sarkanas
Genial. Vielen Dank. Bist Du in der Lage einen Link zu erstellen der die Strömungsverhältnisse anzeigt vom März 2014 bis September 2014 ? Würde schneller gehen wenn Du das mal in die Hand nehmen würdest.
Genial. Vielen Dank. Bist Du in der Lage einen Link zu erstellen der die Strömungsverhältnisse anzeigt vom März 2014 bis September 2014 ? Würde schneller gehen wenn Du das mal in die Hand nehmen würdest.
Was geschah mit Flug MH370?
15.01.2015 um 03:03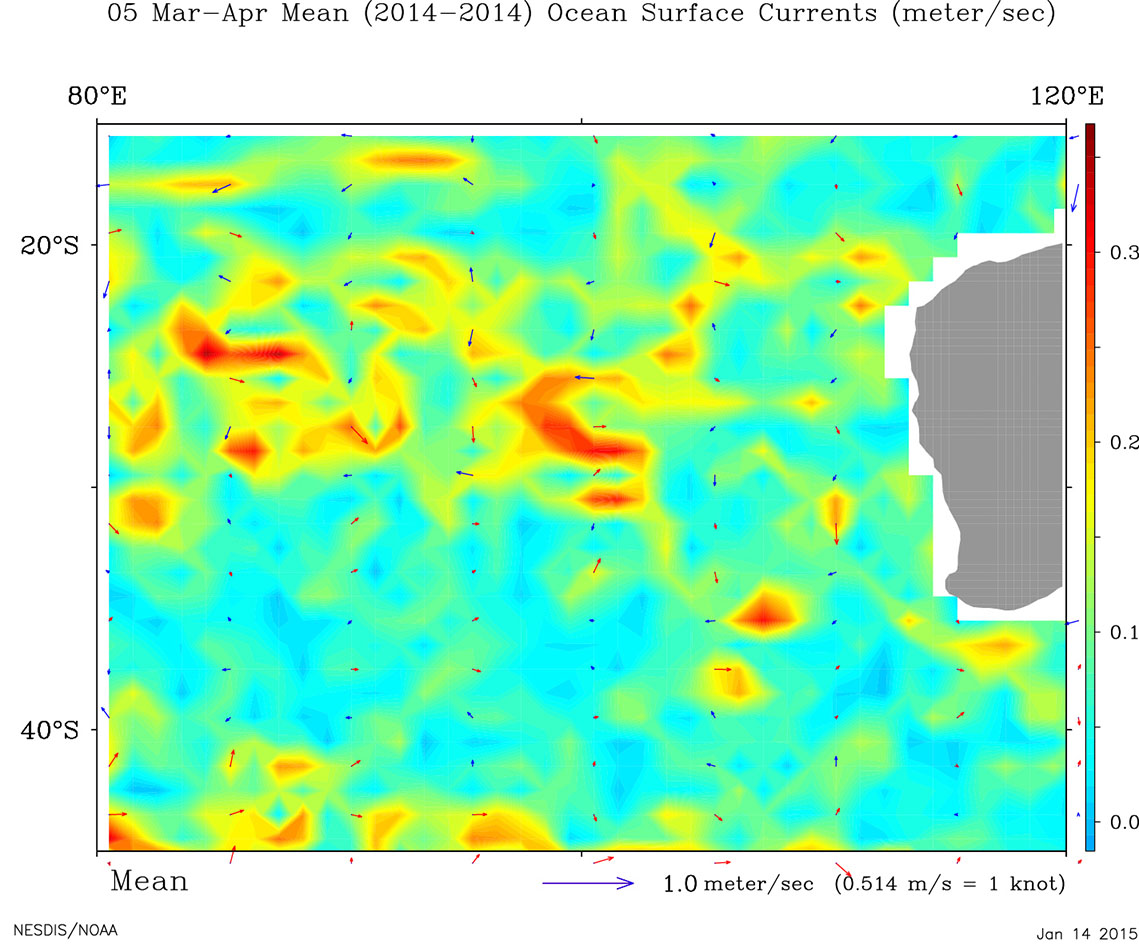
DearMRHazzard
Profil anzeigen
Private Nachricht
Link kopieren
Lesezeichen setzen
dabei seit 2011Unterstützer
Profil anzeigen
Private Nachricht
Link kopieren
Lesezeichen setzen
Was geschah mit Flug MH370?
15.01.2015 um 03:05@sarkanas
Perfekt. Damit lässt sich arbeiten. Das hatten wir hier noch nicht. Drift-Analyse der Wrackteile. Mal schauen was sich da machen lässt. Spannendes Feld.
Perfekt. Damit lässt sich arbeiten. Das hatten wir hier noch nicht. Drift-Analyse der Wrackteile. Mal schauen was sich da machen lässt. Spannendes Feld.
Ähnliche Diskussionen
China Eastern Airlines Flug MU5735 abgestürzt - menschliche Absicht?
MH370/08MAR2014 - Theorien?
Coronavirus fehlschlag Operation der Amerikanischen neocons?
Erhöhte nächtliche Flugbewegungen aus der Türkei nach Deutschland
Unbestelltes Saatgut aus China: Zufall?
Haben die USA die Medien übernommen?
Was geschah mit Flug MH370?